


-
物流ニュース
社整審 隊列走行システム説明、電子制御で複数台けん引
2017年1月23日
トラックドライバー不足を解消する一つの方策として、「トラックの隊列走行」の実現に向けた検討が進んでいる。現在、想定されているのは、高速道路のSA/PA間での走行で、先導車のドライバーが認知および判断をし、電子制御による無人トラックを複数台けん引するというもの。技術面やインフラ整備などまだまだ課題は多く、一部では早期実現は困難との声も聞かれるが、「人口減少」「少子高齢化」の中でも人材を確保していかなければならない経営者にとって、依然として期待は大きい。
昨年12月12日、国交省が開催した「社会資本整備審議会道路分科会基本政策部会」(石田東生部会長、筑波大学システム情報系社会工学域教授)で、自動運転技術開発に関する民間企業・団体のヒアリングが行われ、先進モビリティ(東京都目黒区)の青木啓二社長が、トラック隊列走行のシステム開発状況を説明している。
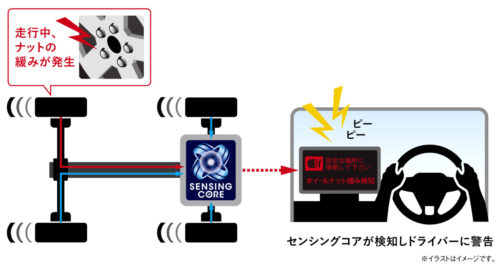
トラックの隊列走行には、ミリ波レーダーやレーザーレーダーによる「速度・車間距離の自動制御技術」、後続車を管理するための「車線変更支援システム」、車線維持制御や区画白線が見えない場合に先頭車を追尾するための「ハンドル自動制御技術」が必要となってくる。

隊列内に一般車両が割り込むと自動運転を継続できないため、車車間通信を利用した近接車間での距離制御や、先頭車両(有人)が急ブレーキをかけた際に、車間距離の狭い隊列内で衝突が起こらないための高性能なブレーキ制御技術も求められる。また、雨天、降雪時、夜間、薄暮など様々な気候のもとでも安定した走行ができるよう、レーダー、カメラ、GPSなど作動原理の異なるセンシングを組み合わせた制御技術や、制御システムが故障した際の安全性の確保は必須だ。
安全性の確保については、「制御装置故障時に、減速して最寄りのSA/PA/ICまで時速20km程度の低速で走行し、同一装置が二重で故障した場合に自動停止する」というように、主要制御装置を二重化、三重化したり、コンピューター制御の異常を検出すると、故障箇所を自動的に切り離すなどの対策を想定している。
国交省では昨年11月22日から、1台で大型トラック2台分の輸送が可能な「ダブル連結トラック」の実証実験を実施しているが、先進モビリティの調査によると、「事業採算を考えると、後続車は無人で最低3台の隊列が望ましい」という一部のトラック運送事業者からの要望は根強く、実際に「4台以上でないと採算が合わないという試算もある」(青木氏)ことから、青木社長は「技術的には大変難しいが、実現に向け、できる限り取り組む」と話している。
なお、同省が昨年11月25日に開催した「生産性革命本部」(本部長=石井啓一国交大臣)の第4回会合で、トラックの隊列走行については、2017年度にテストコースで、18年度には公道での実証をスタートさせる方針を示している。
◎関連リンク→ 国土交通省この記事へのコメント
関連記事
-
-
-
-
「物流ニュース」の 月別記事一覧
-
「物流ニュース」の新着記事
-
物流メルマガ




















-300x200.jpg)
















-300x197.jpg)







と健康推進室の赤城伸子室長-500x327.jpg)



と社員の存在を身近に感じられるフォトフレームのコーナー(右)-500x312.jpg)


